* 수식이 많아 캡쳐하여 올립니다.
* Spong의 '로봇동역학과 제어'라는 책을 풀어서 정리한 내용입니다. 오래전에 만든거라 틀린내용이 있을수 있습니다. 혹시 틀린내용이 있다면 알려주십시오.
* 프린트가 가능하도록 pdf파일로 만들어 업로드 합니다.











* Spong의 '로봇동역학과 제어'라는 책을 풀어서 정리한 내용입니다. 오래전에 만든거라 틀린내용이 있을수 있습니다. 혹시 틀린내용이 있다면 알려주십시오.
* 프린트가 가능하도록 pdf파일로 만들어 업로드 합니다.
 로봇동역학과제어chapter2.pdf
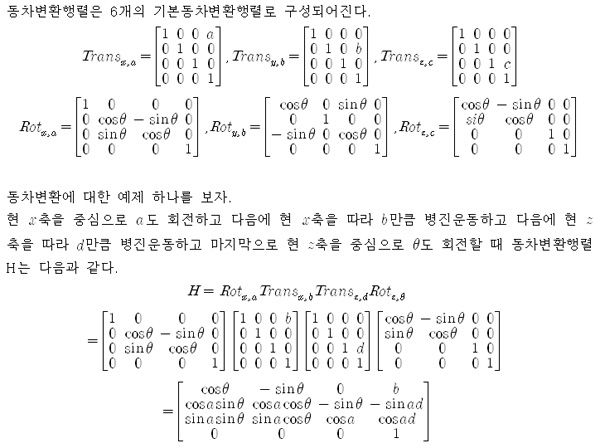
로봇동역학과제어chapter2.pdf□ 강체운동(Rigid Motion) = 회전(Rotation)운동 + 병진(Translation)운동
□ 회전(Rotation)
'Robotics > Control Tech.' 카테고리의 다른 글
| Selectively Damped Least Squares for Inverse Kinematics (0) | 2008.11.11 |
|---|---|
| Forward Kinematics - DH(Denavit-Hartenberg) 표시법 (1) | 2008.11.05 |
| 로봇동역학을 위한 기본개념 (2) | 2008.11.05 |
| 휴머노이드 로봇의 ZMP 제어를 위한 모델링 및 관련 수식 (3) | 2008.07.09 |
| 보간법(Interpolation) (0) | 2008.06.15 |


