최소제곱법(Least Square Method)을 이용한 smoothing filter에 대한 내용입니다.
아래그림은 노이즈가 있는 신호에 대해서 필터링을 통한 결과를 보여줍니다.
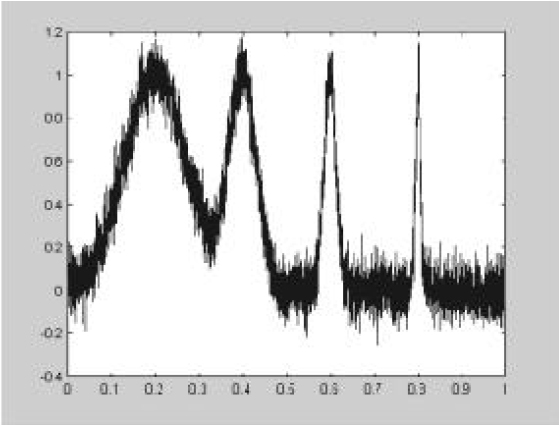
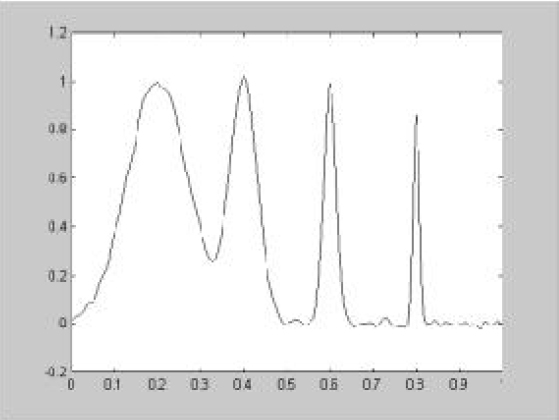
아래그림은 노이즈가 있는 신호에 대해서 필터링을 통한 결과를 보여줍니다.
'Robotics > Control Tech.' 카테고리의 다른 글
| Scara로봇의 Inverse Kinematics 예제 (0) | 2008.02.17 |
|---|---|
| Pendulum cart system의 dynamic modeling (0) | 2008.02.17 |
| 휴머노이드 로봇의 ZMP(Zero Moment Point)관련 논문 모음 (0) | 2008.02.17 |
| 휴머노이드 로봇 GUROO 논문모음 (0) | 2008.02.17 |
| 브러시리스 DC모터 제어회로의 설계 (0) | 2008.01.06 |
