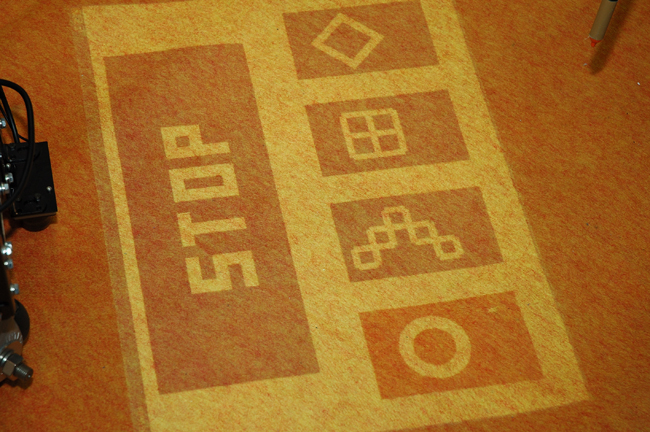
로봇앞에 빔 프로젝터로 로봇 이동 컨트롤을 위한 화면을 뿌린다. 뿌려진 그림위에 사람이 발로 밟으면
로봇이 움직인다..
아이디어는 참 좋은것 같은데.. 단점이 있을것 같다.
1. 바닥이 반사되는 재질이라면..
2. 출력이 높은(High ANSI) 프로젝터를 사용할 경우.. 배터리 문제는??
3. 어디다가 써먹지??
이런 인터페이스를 사용할데가 어디에 있을까.. 어떻게 보면 단순한 구조를 가지는데.. 너무 많은 에너지를
소모하고 있지 않은가.. 빔 프로젝터에 이걸 사용하기 위한 큰 배터리에.. 발 위치를 잡기위한 레이져스캐너에..
흠...
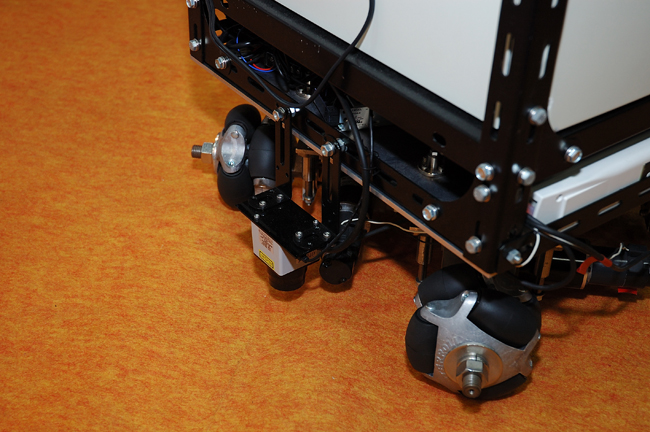
발의 위치를 하단의 레이져 스캐너로 잡아낸다..
그리고, 나의 경험상.. 저런 전방향 이동가능한 휠...(메카넘 휠 이라고 하던가..)의 경우
효율이 그다지 좋지 않다는 것과 드라이브시 소음이 심하다는 것...

위 사진처럼 동작된다는 것..
발의 위치를 레이져스캐너로 찾아내서 어디가 눌려졌는지를 판단한다는 것..
시스템은 아주 단순..
'Robotics > Interface' 카테고리의 다른 글
| [Flex3 AIR] MFC와 소켓 통신 준비 (0) | 2008.09.02 |
|---|---|
| Flash를 이용한 웹캠 모션감지 (0) | 2008.09.01 |
| wii 리모컨을 이용한 새로운 인터페이스 (0) | 2008.07.03 |
| wii를 이용한 새로운 인터페이스 (0) | 2008.07.02 |
| [Wav]Sonic Ring (0) | 2008.02.24 |
