2004년 IECON 학회에서 소니의 SDR-4X II.. 이게 소니에서 개발한 큐리오(Qrio)다.
그때 발표 프리젠테이션 자료를 발표자의 동의를 구하고 사진을 찍어 놓은것이다..
시간이 많이 지났지만.. 혹시나 해서 올려본다.
제목은,
'Development of a New Actuator for a small biped entertainment robot'

그때 발표 프리젠테이션 자료를 발표자의 동의를 구하고 사진을 찍어 놓은것이다..
시간이 많이 지났지만.. 혹시나 해서 올려본다.
제목은,
'Development of a New Actuator for a small biped entertainment robot'
큐리오라는 소니에서 개발한 2족 보행로봇에 사용된 액츄에이터에 대한 논문.
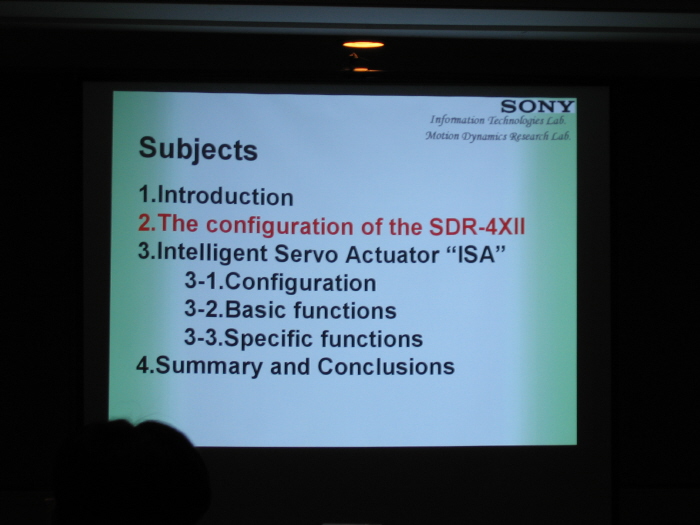
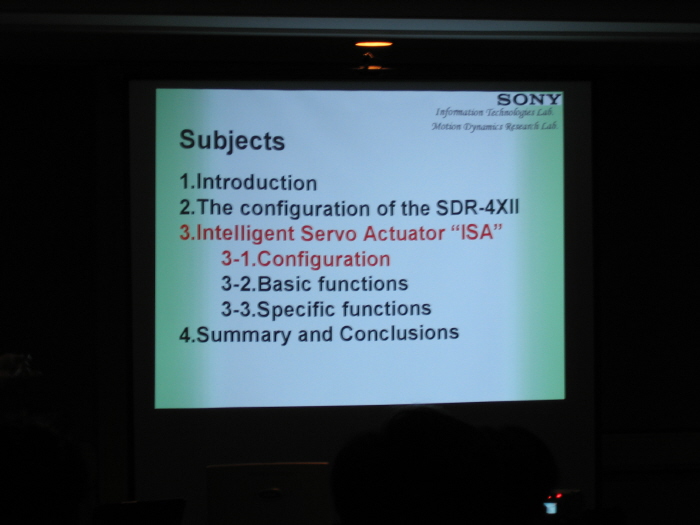
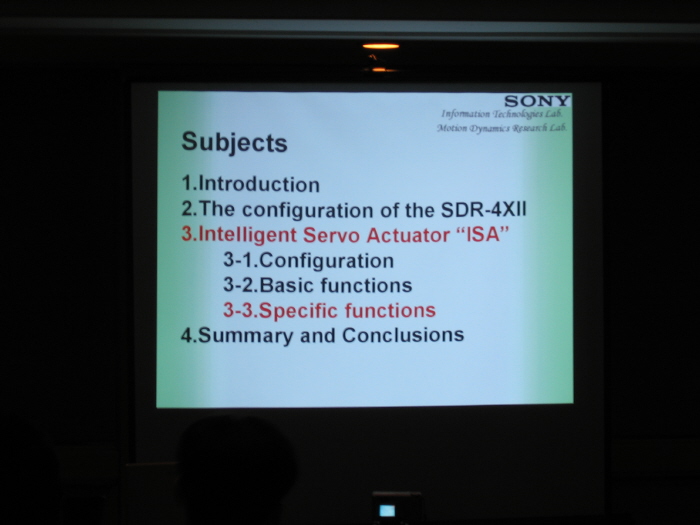
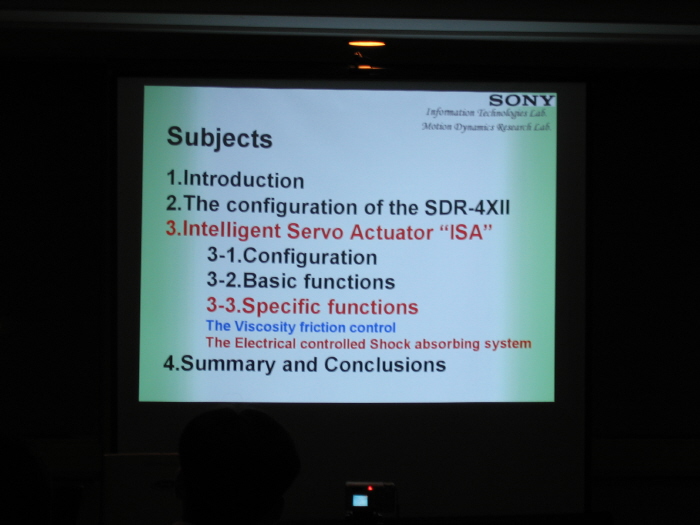
목차를 보자. SDR-4X II에서 사용된 'ISA'라는 액츄에이터가 주요.
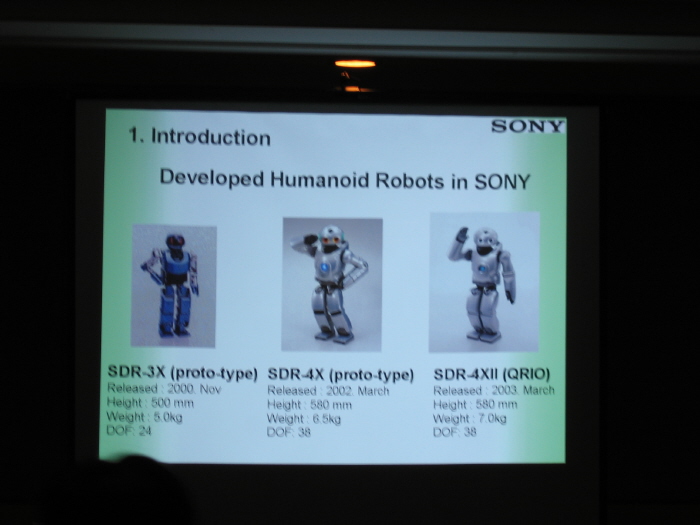
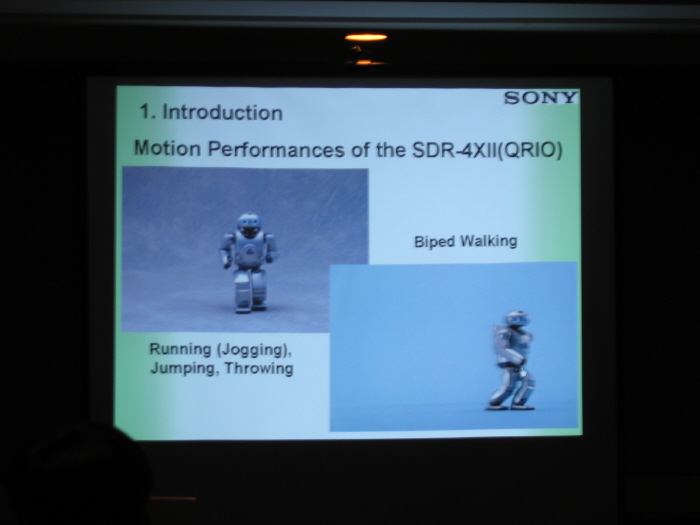
소니에서 개발된 플랫폼들. sdr-3x, sdr-4x, sdr-4x ii.
저 조그만한 2족 보행로봇이 38자유도를 가지고 있다. 그리고 ISA라는 액츄에이터가 적용된 플랫폼들이다.
sdr 3x : http://www.sony.net/SonyInfo/News/Press_Archive/200011/00-057E2/저 조그만한 2족 보행로봇이 38자유도를 가지고 있다. 그리고 ISA라는 액츄에이터가 적용된 플랫폼들이다.
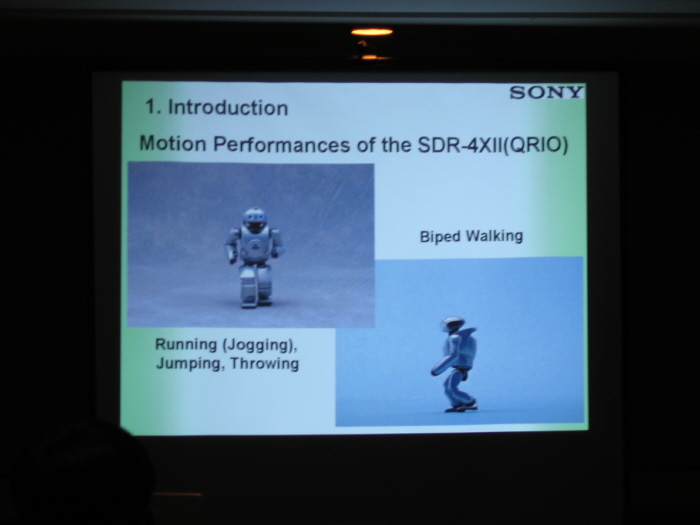
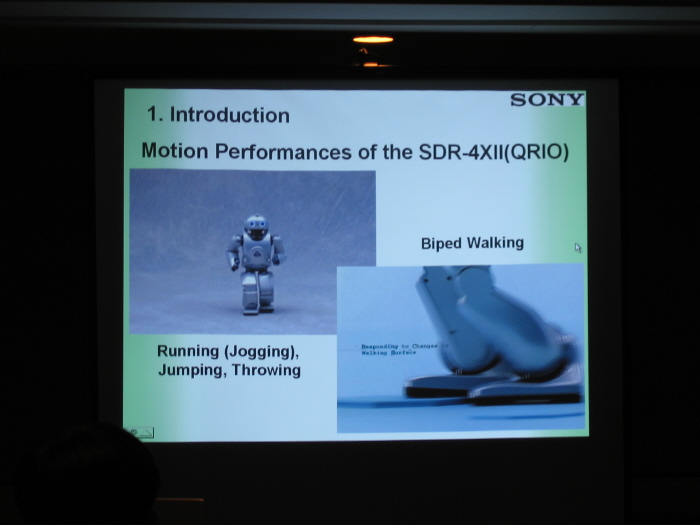
모션 동영상을 보면, 아주 smooth하게 움직인다.
동영상으로 플랫폼에 대해서 자세히 설명한것 같다.(오래되서 기억이...-_-)
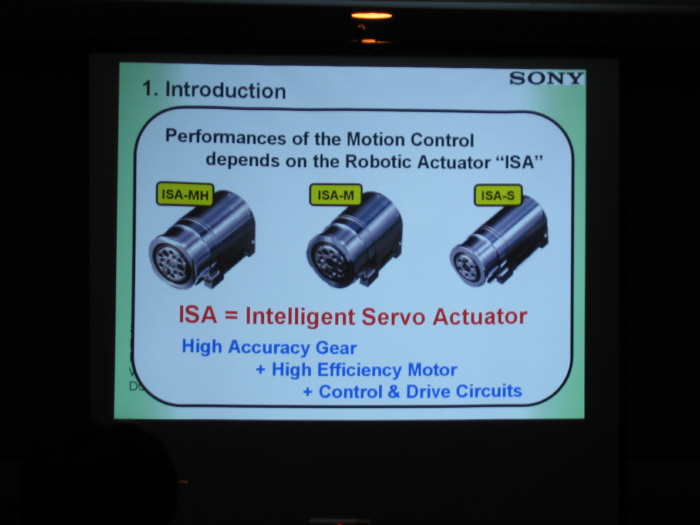
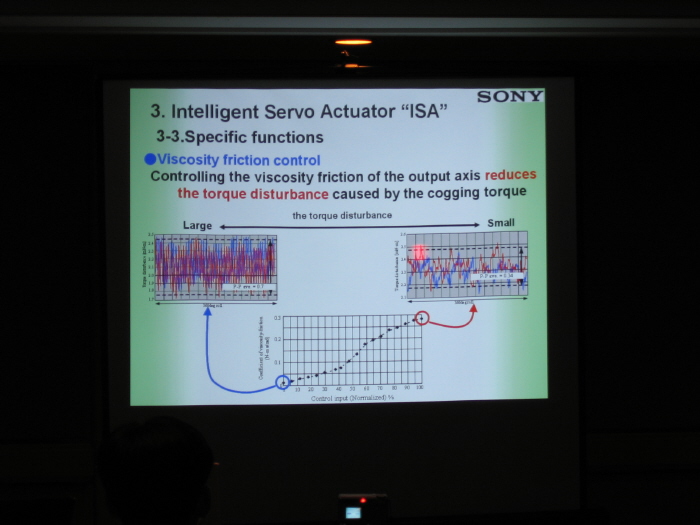
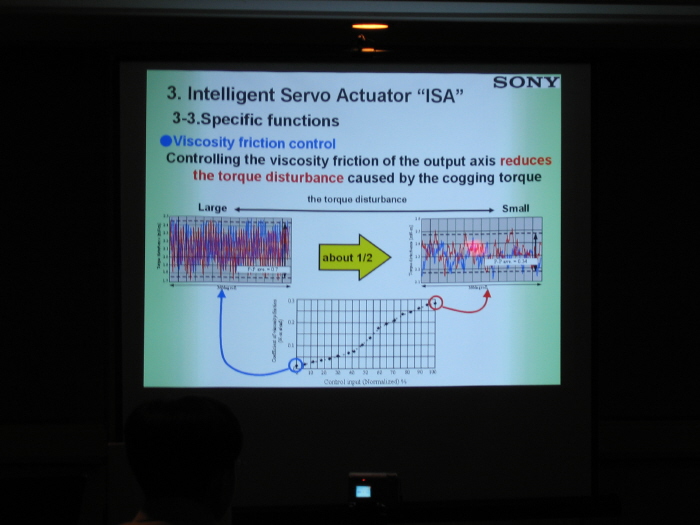
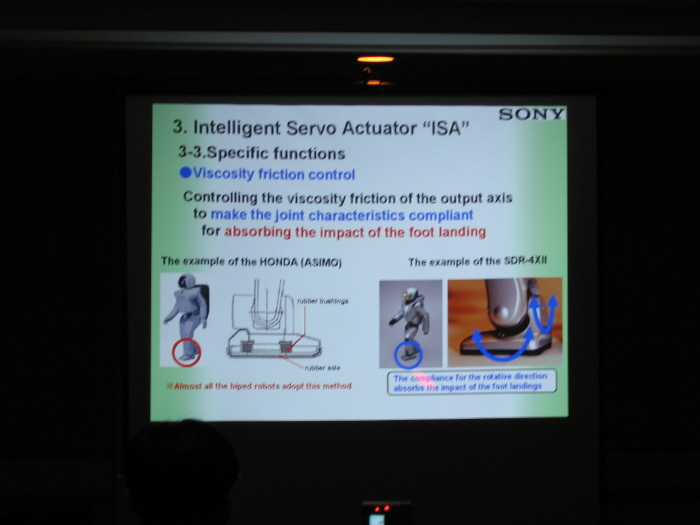
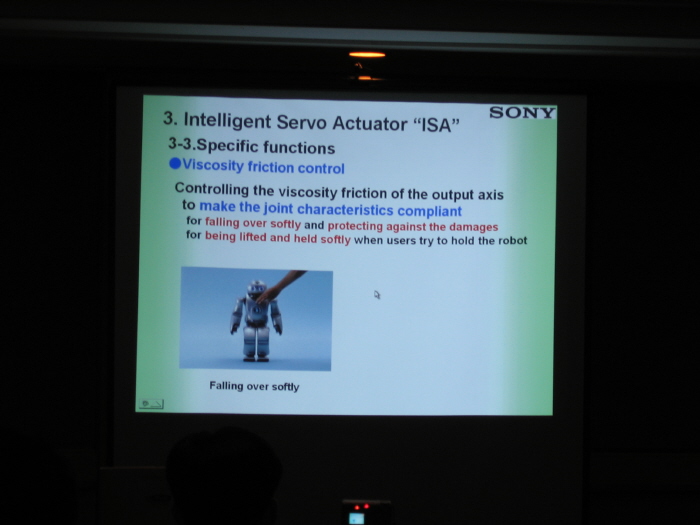
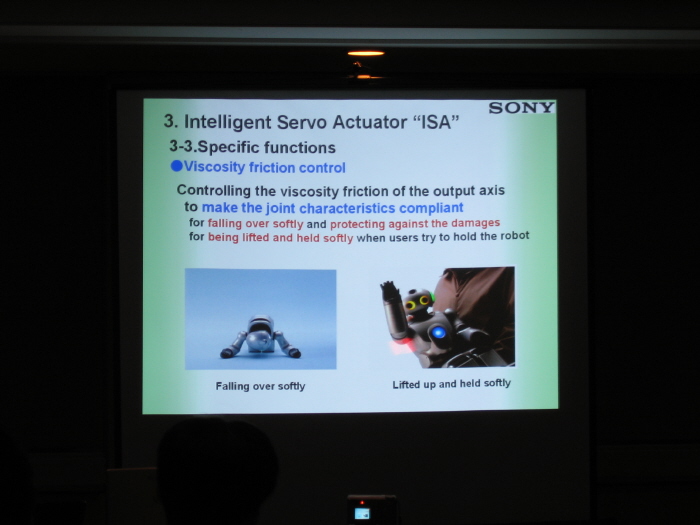
ISA(Intelligent Servo Actuator)를 개발했고, 이것을 큐리오 플랫폼에 적용했다라는..
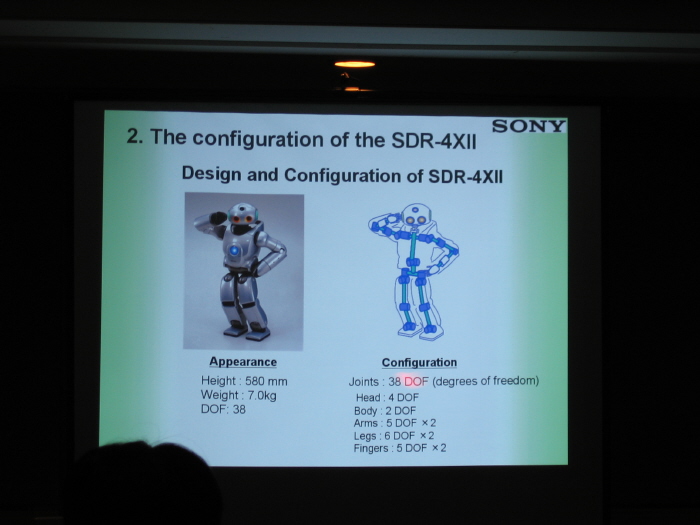
SDR-4X II의 스펙 차례.
Height : 580mm
Weight : 7.0Kg
DOF : 38(Head:4, Body:2, Arm:5x2, Leg:6x2,Finger:5x2)
조 조그만한게 손가락에도 5자유도나 있다.
Weight : 7.0Kg
DOF : 38(Head:4, Body:2, Arm:5x2, Leg:6x2,Finger:5x2)
조 조그만한게 손가락에도 5자유도나 있다.
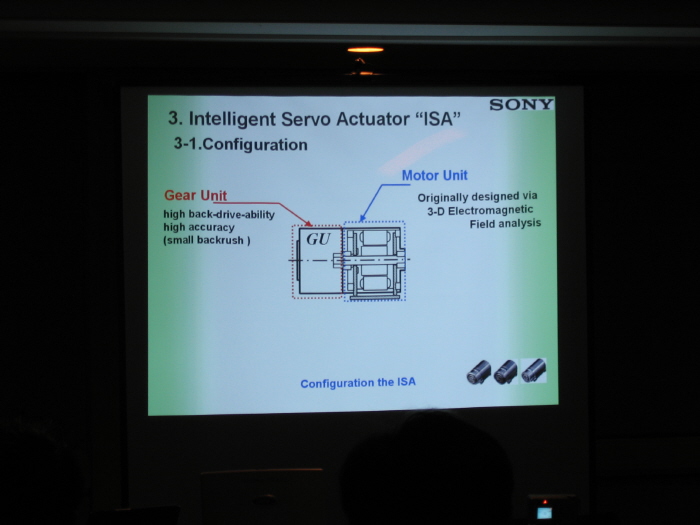
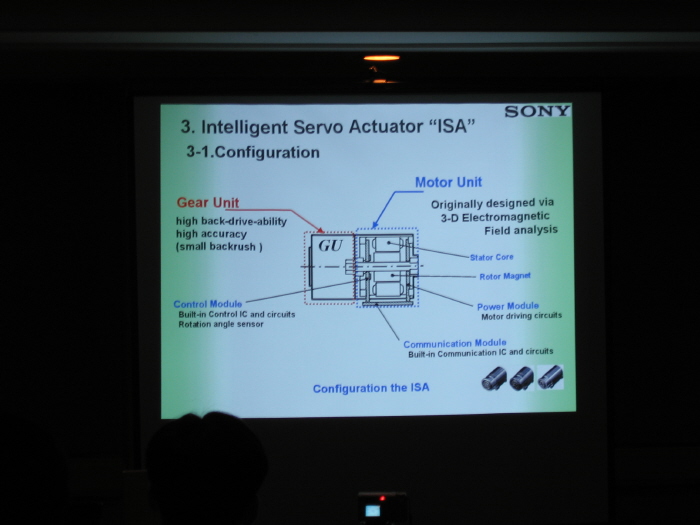
ISA Configurations.
모터와 기어가 결합되어 있는 형태. 뭐 일반적인 내용만 이야기한걸로 기억한다.
모터와 기어가 결합되어 있는 형태. 뭐 일반적인 내용만 이야기한걸로 기억한다.
내부에 컨트롤러와 통신모듈까지 포함되어있다는것이 특징.
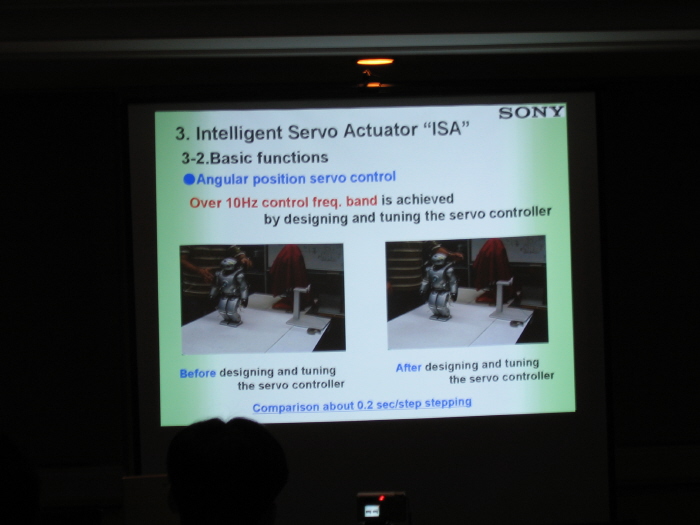
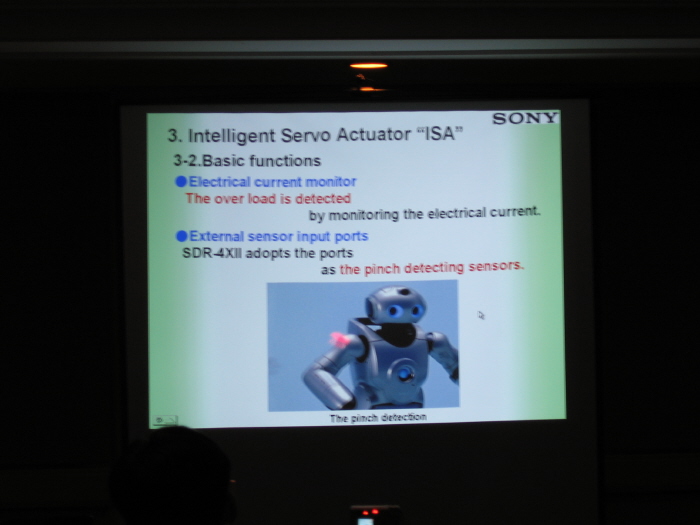
Basic Functions
Angular position servo control.
10Hz이상의 control frequency. 즉 0.1초이상의 제어 타이밍을 가진다는 것.
이것은 아마 digital control에서 sampling time을 가져 제어한다는 의미인데, 사실 엔터테인먼트 로봇의 경우 정밀제어가 필요하지 않을것으로 판단되는데, 10Hz이면 그 용도로는 적당할 것 같지만, 그리 넉넉한 control frequency는 아닌것 같다는 생각..
10Hz이상의 control frequency. 즉 0.1초이상의 제어 타이밍을 가진다는 것.
이것은 아마 digital control에서 sampling time을 가져 제어한다는 의미인데, 사실 엔터테인먼트 로봇의 경우 정밀제어가 필요하지 않을것으로 판단되는데, 10Hz이면 그 용도로는 적당할 것 같지만, 그리 넉넉한 control frequency는 아닌것 같다는 생각..
과부하(over load) 검출, 모터에 입력되는 전류를 detecting하여 과전류로 인한 모터및 회로 보호를 위한것.
외부센서 입력포트도 있다. pich detecting sensor라는 것은 아마 로봇팔같은데, 어떤 물체가 껴서 문제가 발생하지도 모르기때문에 그것을 감지하는 센서를 말하는것 같다.
외부센서 입력포트도 있다. pich detecting sensor라는 것은 아마 로봇팔같은데, 어떤 물체가 껴서 문제가 발생하지도 모르기때문에 그것을 감지하는 센서를 말하는것 같다.
끝.
'Robotics > Articles' 카테고리의 다른 글
| 국내의 안드로이드 EveR-2의 모델은 누구일까.. (0) | 2008.04.27 |
|---|---|
| 차세대신기술 개발사업 - 퍼스널 로봇의 고기능 모듈 기술개발 (0) | 2008.03.01 |
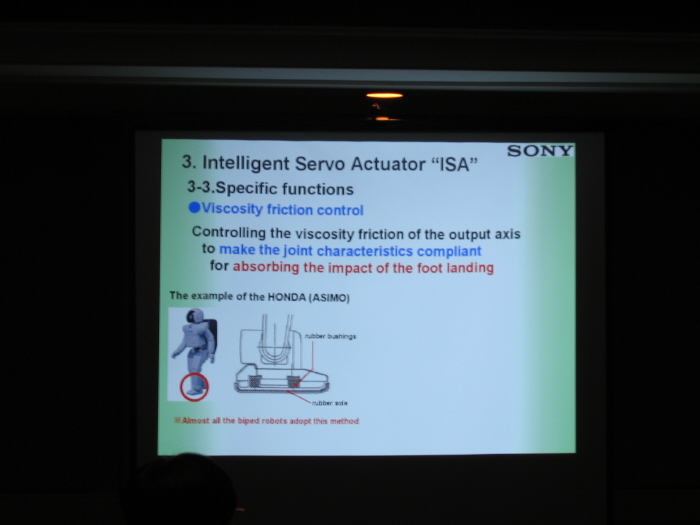
| ASIMO Technical Information (0) | 2008.02.17 |
| Flex 참고자료 URL (0) | 2008.01.21 |
| 로봇 소프트웨어 플랫폼 관련 기술 특허동향 (0) | 2008.01.17 |


