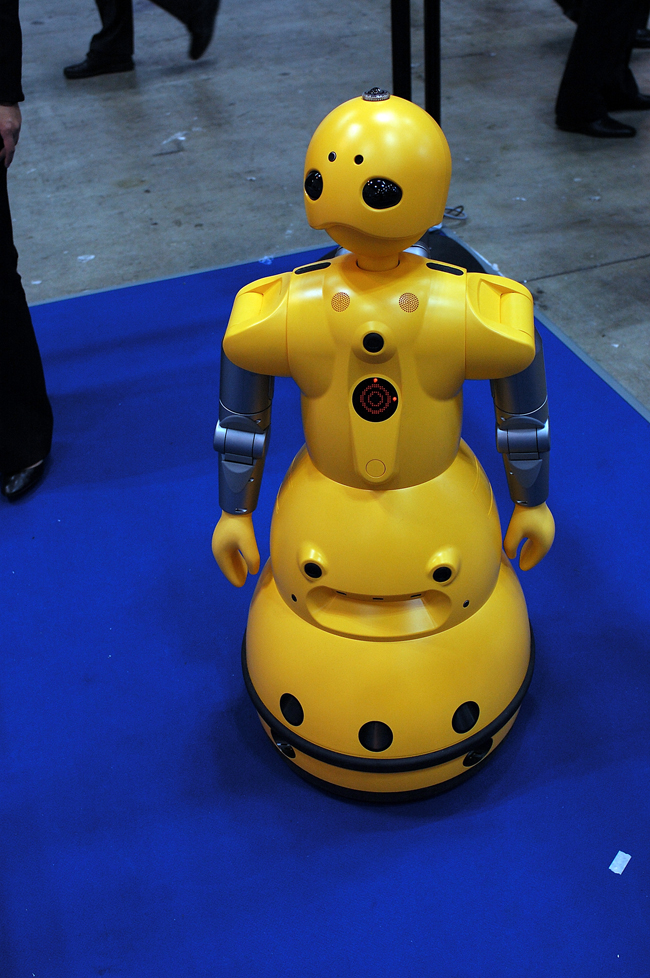
일본 미쓰비시 중공업에서 개발한 와카마루..
일본에서는 아시모만큼이나 인기가 좋은 로봇중 하나..
그리고, 아시모만큼의 완성도를 보이는 로봇중 하나..
전시 부스에 가서 물어보니깐, 현재 일본에 20여대 정도 납품이 되었다고 한다.
그리고 대여사업도 하는데, 1일 대여하는데 10만엔이라고 한다.
머리에 있는 더듬이가 자랐을법한 두개의 구멍은 카메라와 마이크이다.
머리 꼭대기에 있는것은 카메라.. 이 카메라의 용도는 다양.. 위치인식과 사람인식을 위한 것이라고..
이 카메라를 이용하여 사람이 다가오는 방향을 인식하는 논문도 나와있다.. 구글에서 찾아보면 나옴.

이런 로봇 컨트롤 장치는 많이 봤다. (이제는 조금 식상하다..)
구조는 짐작컨데, 위 사람의 손에는 3축 가속도센서 또는 틸트센서나 자이로센서가 있을것이다.
3축가속도 센서는 손의 3차원 좌표를 알아내기 위함일테고.. 틸트나 자이로는 각도를 알아낼때 사용하겠지..
사람의 손 위치를 로봇에 전달해주면 이것을 로봇의 팔과 적당히 매핑하는 작업을 할테고..
(왜냐하면.. 사람의 팔길이와 로봇의 팔 길이가 다르기때문이겠지..)
적당히 매핑이 끝나면 로봇이 최종적으로 도달해야할 팔의 끝단위치가 나오고..
이 끝단위 좌표를 가지고 Inverse Kinemtics를 해석하면 각 관절이 움직여야할 각도가 생성되는 구조가 되겠다.
이런건 왠만한 로봇관련 동아리에서 활동하는 대학교 2학년정도면 대충 감이 오는 시스템..
그런데, 그 정확성이 떨어지기 때문에..
저걸 이용해서 무엇을 하겠다는건 조금 힘들것 같다.. 정확한 위치로 가야 물건을 잡던가 하지..
뭐 로봇에게 모션을 주입시키기위한 하나의 방법정도로 사용하면 편리할 듯..

어깨에 있는 검정색 띠같은것은 터치센서인데..
저기에 손을 올려두면 로봇이 고개를 단순히 돌리는데.. 단순히 돌리는게 아니라 주변에 사람을 찾는다..
그리고 얼굴을 마주본다.. 로봇이 나를 쳐다본다는 느낌.. 로봇같지않다는 느낌을 들게한다.
팔.. 잘만들었다..
관절마다 엔코더와 감속기때문에 툭툭튀어나온 우리나라 로봇과는 사뭇 느낌이 다르다..
(뭐 기술이 부족해서가 아니라..돈이 문제겠지만..)
제일 하단의 치마(?)밑으로 두른 검정색띠는 범퍼센서다..
일종의 공기가 든 튜브인데.. 부딪히면 공기가 빠져나가고 이걸 측정해서 충돌을 감지한다.
하나의 센서로 전방향을 다 감지할 수 있다. 하지만 충돌위치는 알지 못하겠지..
'Robotics > Articles' 카테고리의 다른 글
| URC로봇 시험/인증 기술동향 (0) | 2008.01.17 |
|---|---|
| 범용 로봇 소프트웨어 개발 플랫폼들의 비교 및 미래의 로봇 소프트웨어 시장 전망 (0) | 2008.01.17 |
| AI의 설계 (1) | 2007.12.23 |
| 과학기술은 누구의 것? - 차세대 로봇 - (0) | 2007.11.16 |
| 당신의 조직은 개발자를 올바르게 관리하고 있는가? (0) | 2007.11.05 |
