Samuel. R. Buss의 논문인
"Introduction to Inverse Kinematics with Jacobian Transpose, Pseudoinverse and Damped Least Squares methods" 논문의 일부분을 번역해 보았습니다.
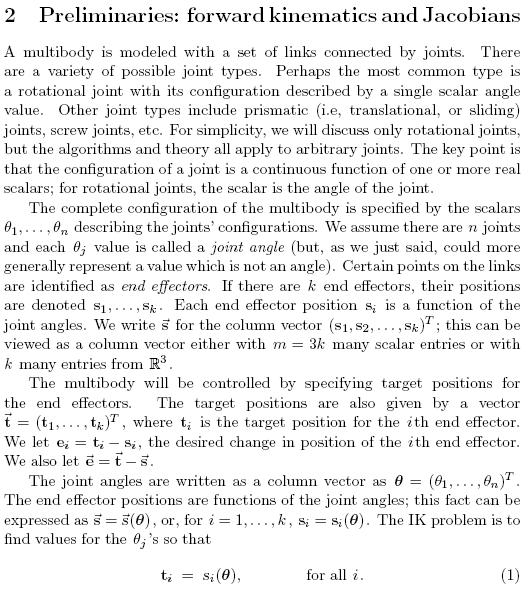
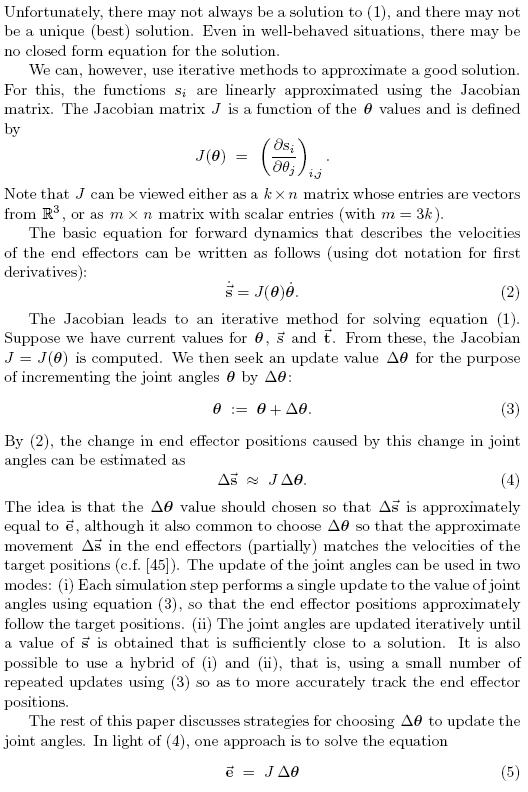
매니퓰레이터의 역기구학(inverse kinematics)을 푸는 알고리즘에 대해 정리한 논문입니다.
내용에 맞게 의역을 해보려 노력했습니다만, 다소 직역처럼 딱딱하게 느껴질 수 있습니다.
그리고, 글 중간중간에 수식이 있는관계로 내용을 캡쳐하여 올립니다.
내용중 틀린부분이 있으면 지적바랍니다. 번역은, section 2부터 5까지 입니다.
----------------------------------------------------------------------------------------------------




"Introduction to Inverse Kinematics with Jacobian Transpose, Pseudoinverse and Damped Least Squares methods" 논문의 일부분을 번역해 보았습니다.
매니퓰레이터의 역기구학(inverse kinematics)을 푸는 알고리즘에 대해 정리한 논문입니다.
내용에 맞게 의역을 해보려 노력했습니다만, 다소 직역처럼 딱딱하게 느껴질 수 있습니다.
그리고, 글 중간중간에 수식이 있는관계로 내용을 캡쳐하여 올립니다.
내용중 틀린부분이 있으면 지적바랍니다. 번역은, section 2부터 5까지 입니다.
----------------------------------------------------------------------------------------------------
'Robotics > Algorithms' 카테고리의 다른 글
| 나이브 베이즈(Naive Bayes) (0) | 2011.12.09 |
|---|---|
| particle filter 튜토리얼 (0) | 2008.10.17 |
| Stereo MIC Tech. (0) | 2007.12.12 |
